Разработка ног ростового аниматроника
При создании аниматроников стоит учитывать что нагрузки на узлы и приводы зачастую бывают очень большие. В целях изучения я решил поработать с отдельными частями возможного аниматроника: ноги человека, анимированная голова человека на шее, управляемая кисть и шея динозавра. В этом посте я хочу поделиться своими наблюдениями при изготовлении аниматроничных человеческих полноростовых ног.
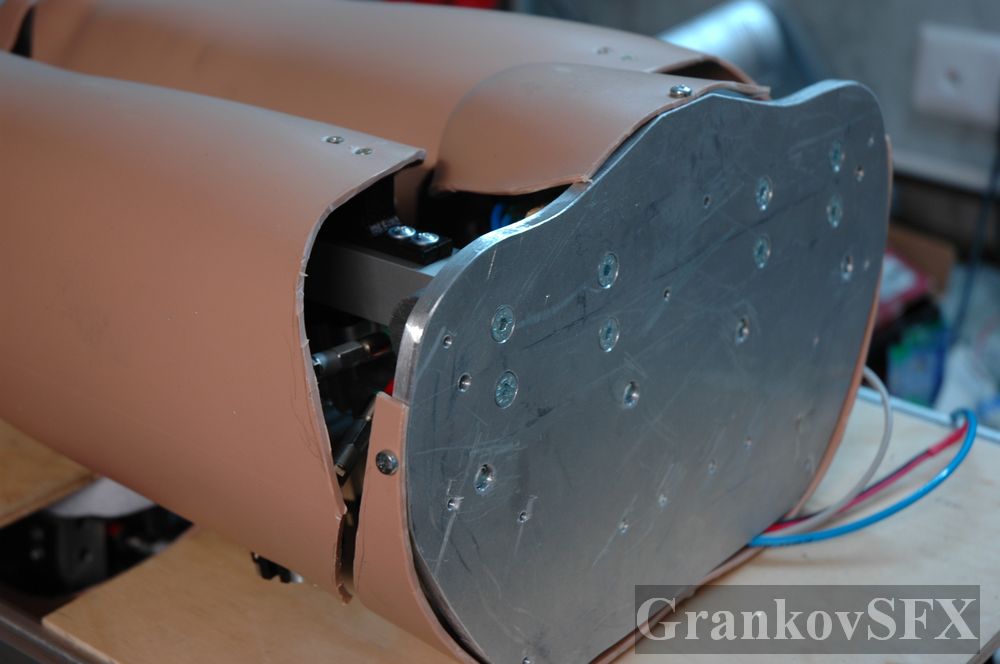
В конце статьи есть фотогалерея двух финишных прототипов в которых напечатанные пластиковые детали заменены на алюминиевые. Начну с самого начала, по мере разработки аниматроника:
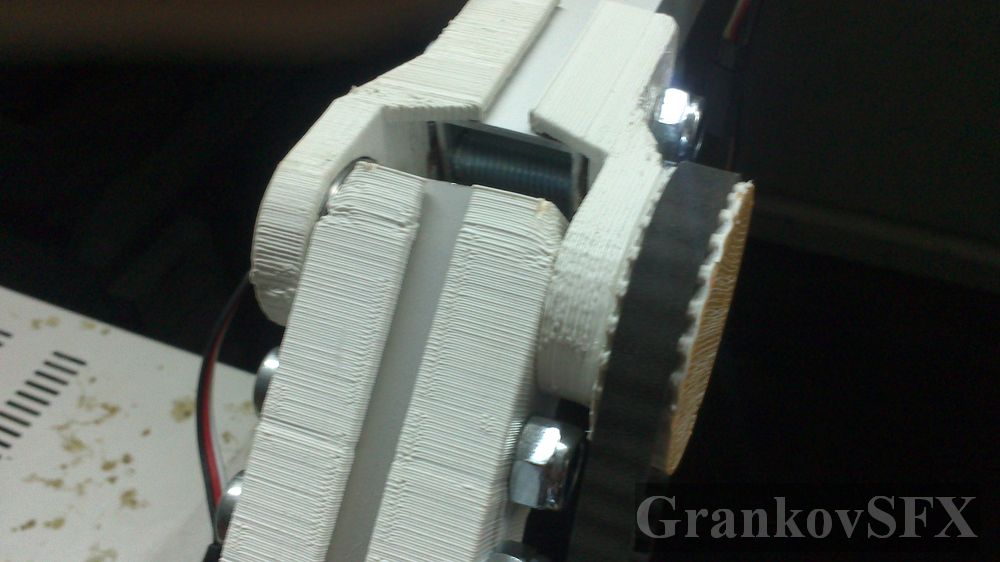
Вначале я решил, что мощные сервомашинки — это то что нужно для того чтобы научить ноги шагать. Я купил 6 сервомашинок больших габаритов SFL-11MGWP (waterproof/24.7kg-cm 6.0v). Они имеют металлические шестерни, два подшипника и влагостойкий корпус.

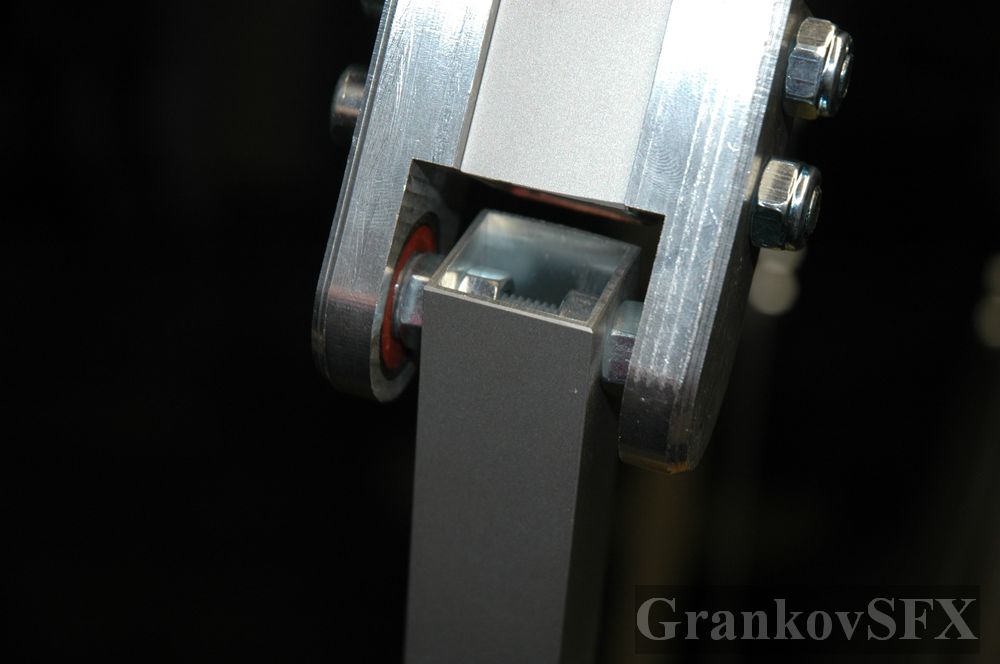
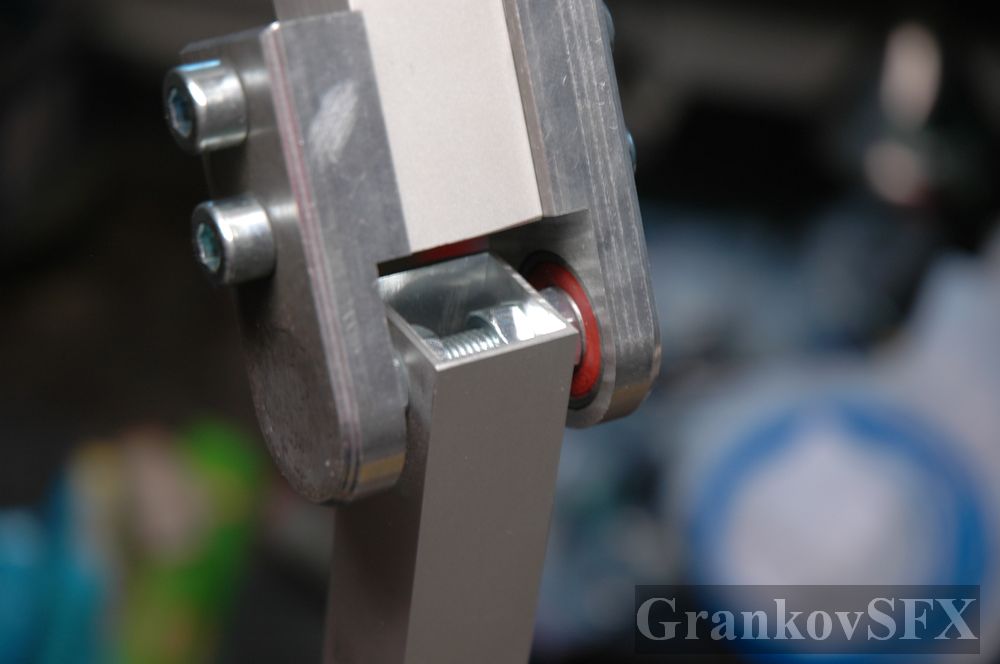
Я приобрёл подходящие подшипники, зубчатый ремень и напечатал на 3D принтере узлы коленного сустава.
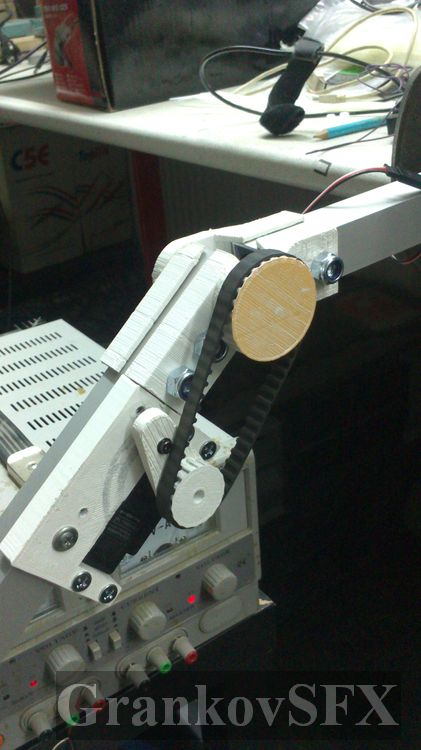

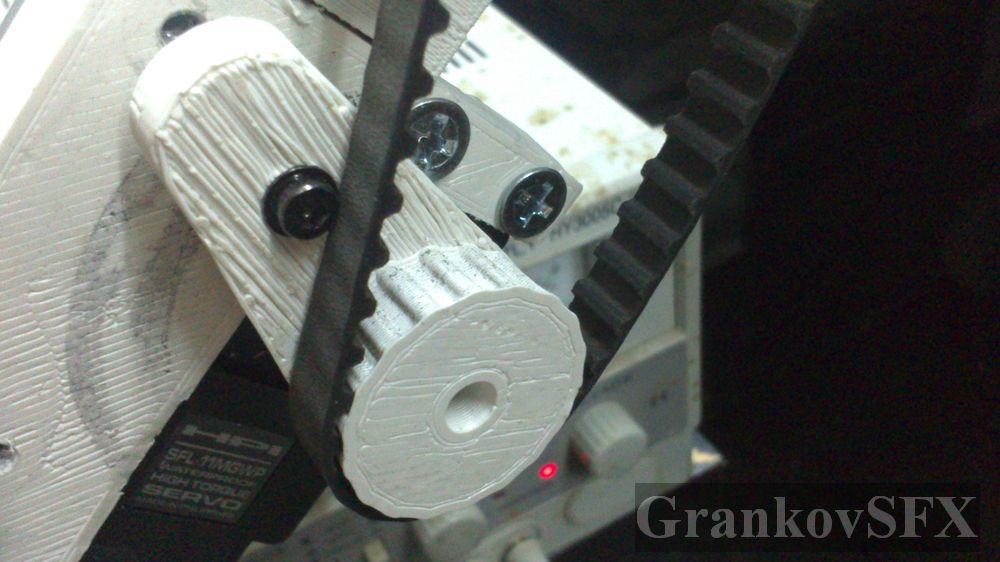

Сервопривод работал на пределе, а когда я на голень одел кед, то сервопривод не смог его поднять, а когда движение немного по-резче, то ремень стал проворачиваться по зубьям шестерней. Оказалось что даже такой мощный сервопривод не подходит для этой задачи. Усилия на колено и бёдра достаточно большие, а ведь это пока голый скелет!
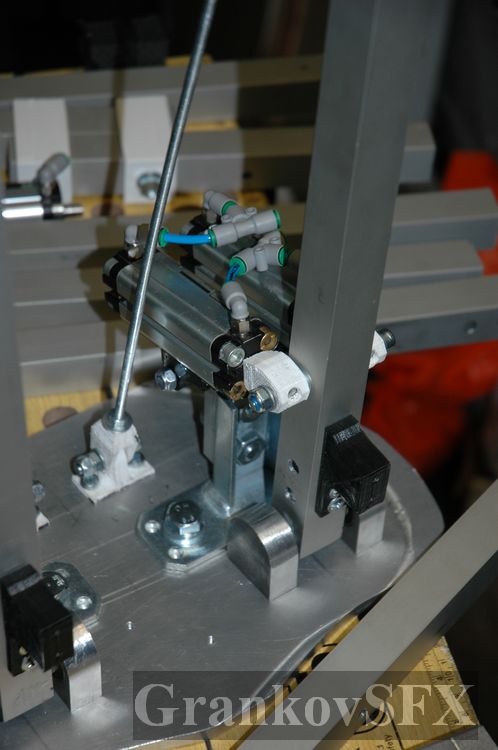
Понятно, что можно поставить сервоприводы мощнее, но они уже не поместятся по габаритам в колено. Это наводило меня на мысль, что может и не надо в колено ставить привод. Достаточно приводить в действие бедро, а голень подтягивать тягой. Для эксперимента я изготовил одну ногу. Приводил её в действие пневмоцилиндр, потому что в месте прикладывания силы нужны большие усилия, чтобы поднять ногу. Электропривод, который справился бы с этой задачей большой и потребляет большое количество энергии (в сравнении, подошёл бы электропривод от дворников автомобиля).

Я остался доволен этим экспериментом. Для изучения характера движения голени (ведь нужно чтобы подъём ноги был реалистичный) я смоделировал аниматроничные ноги в 3D редакторе blender и рассчитал где располагать шарниры тяги.
Помимо того, мне всё равно необходимо было печатать узлы с подшипниками, шарниры пневмоцилиндра и других крепежей на 3D принтере. При моделировании этих анимированных ног я сразу учитывал размеры и конфигурацию этих узлов. И теперь, после успешного теста мне оставалось только напечатать уже имеющиеся модели.

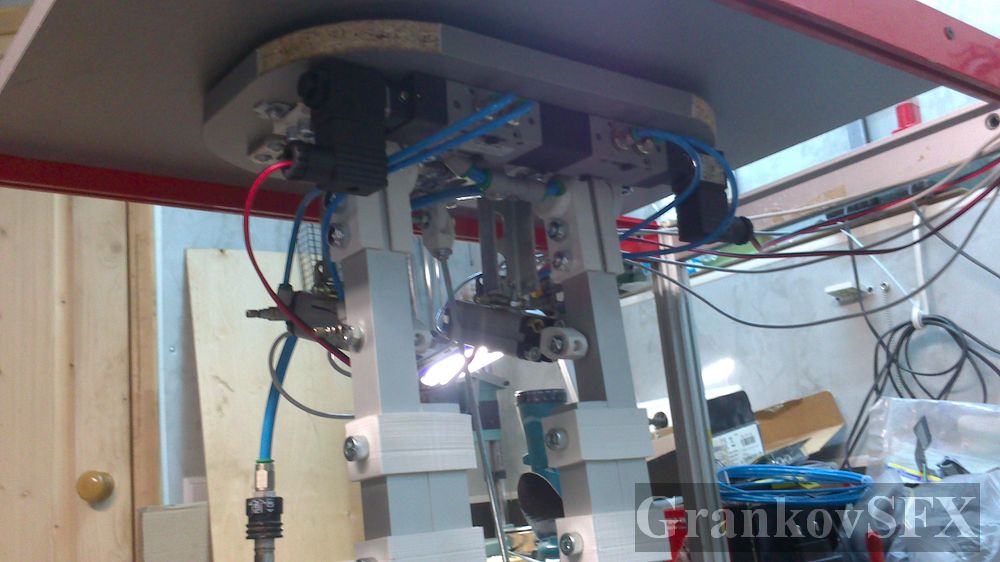


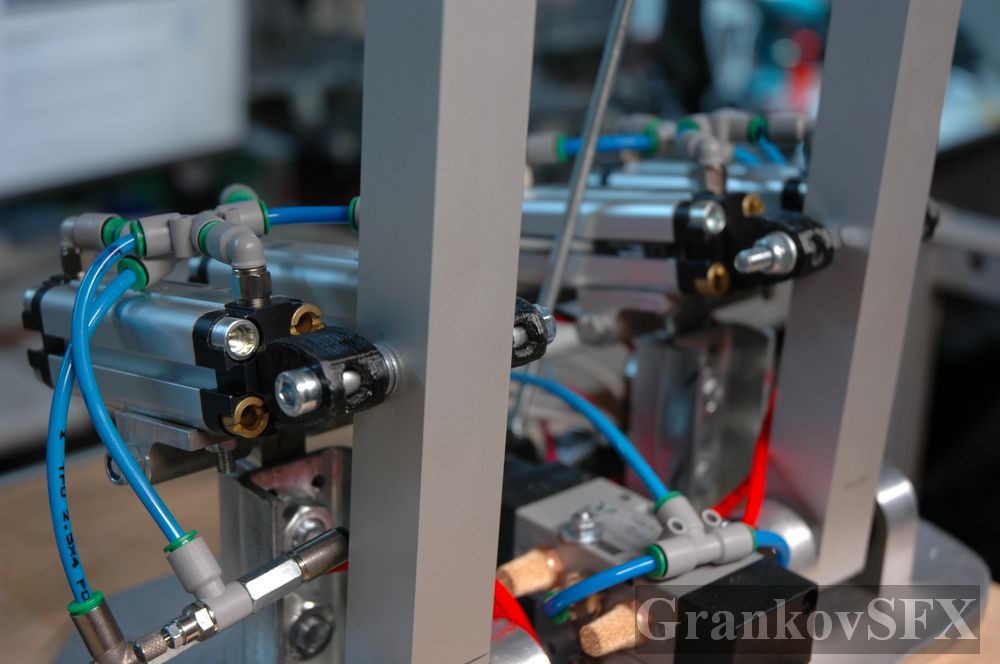
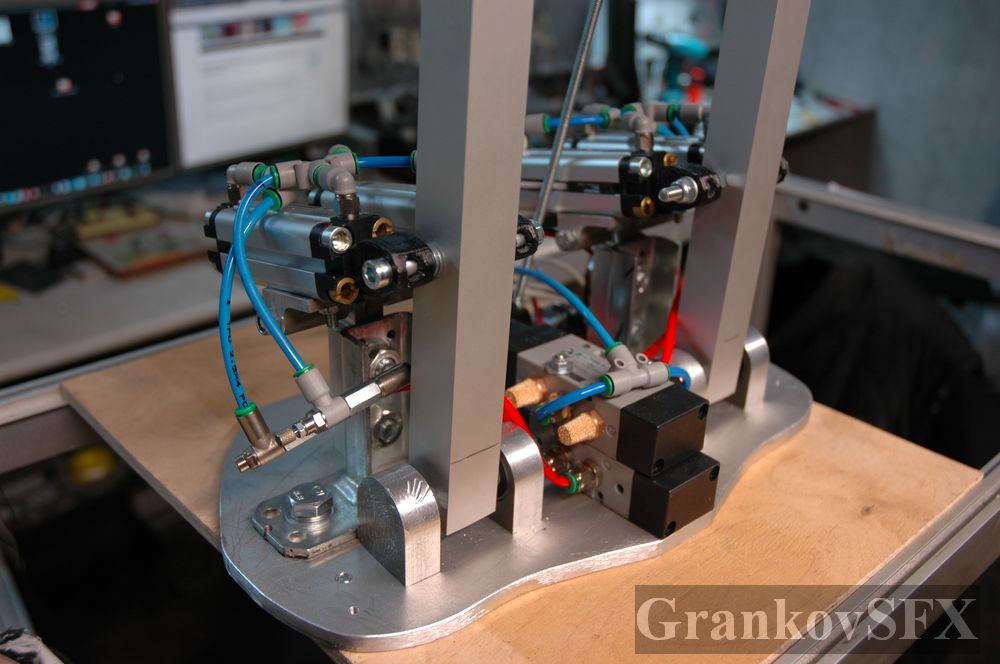
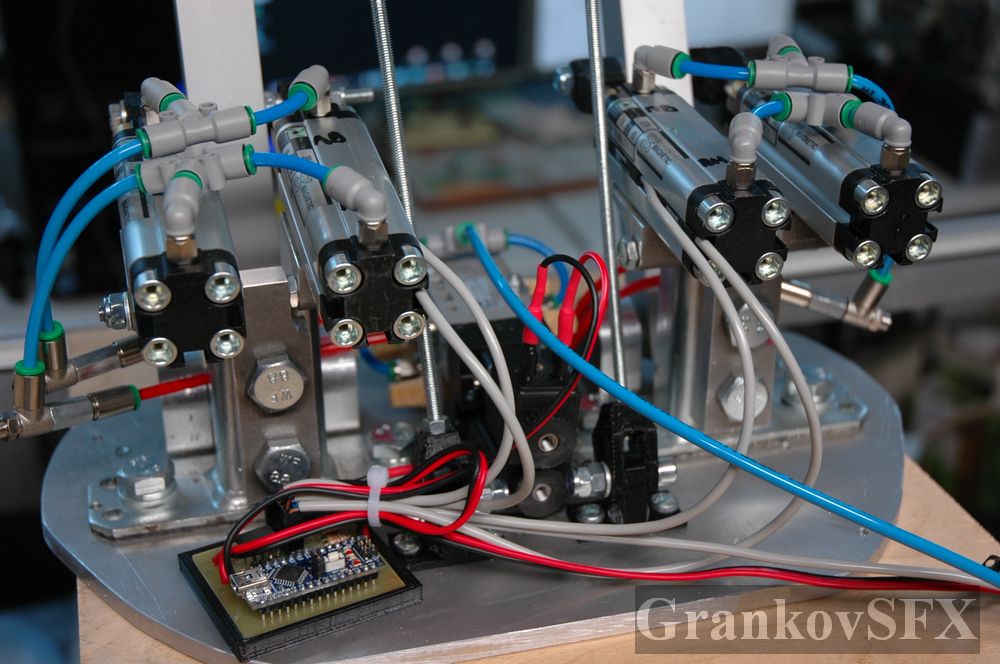
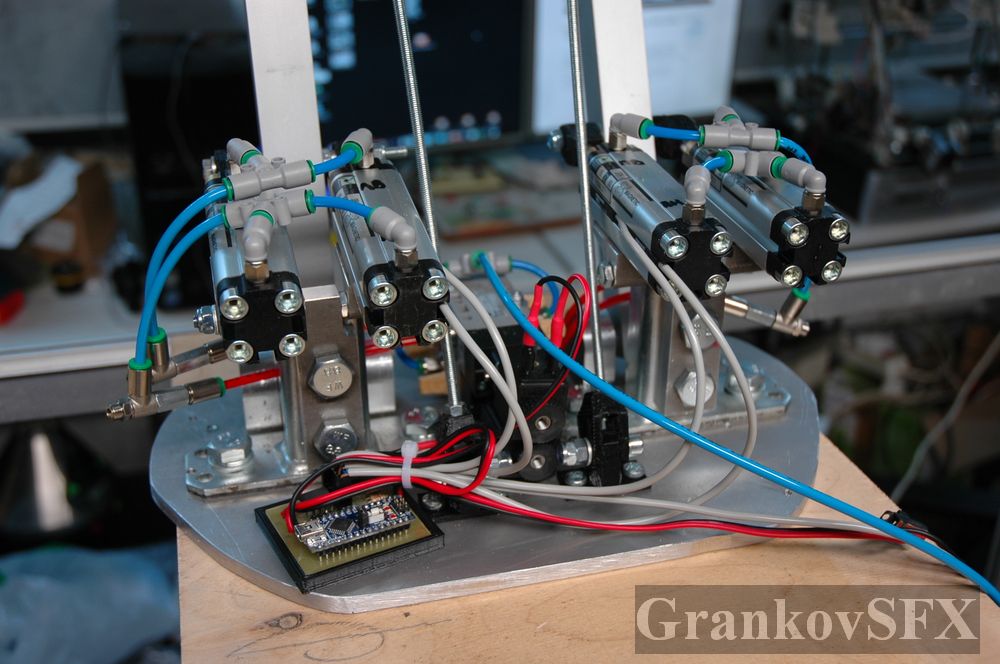
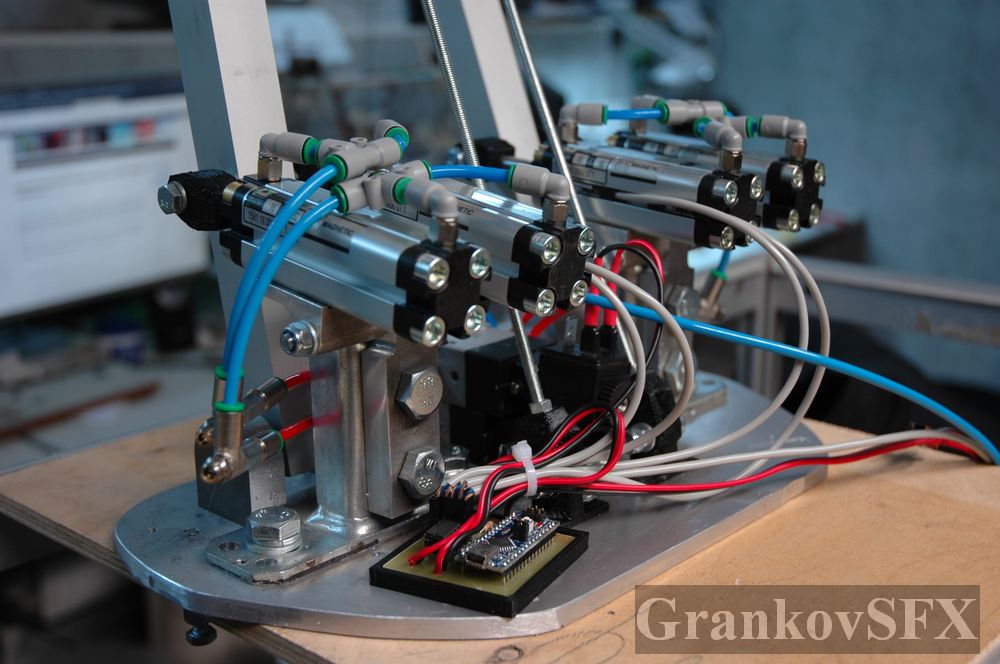
Теперь я повесил на пневмоцилиндры датчик начала и конца хода поршня (поршень с магнитом), пневмораспределители с электромагнитным управлением (катушка 12 вольт) и подключил это всё к микроконтроллеру. Написал программу, по которой ноги при нажатии на кнопку делают 3 шага.
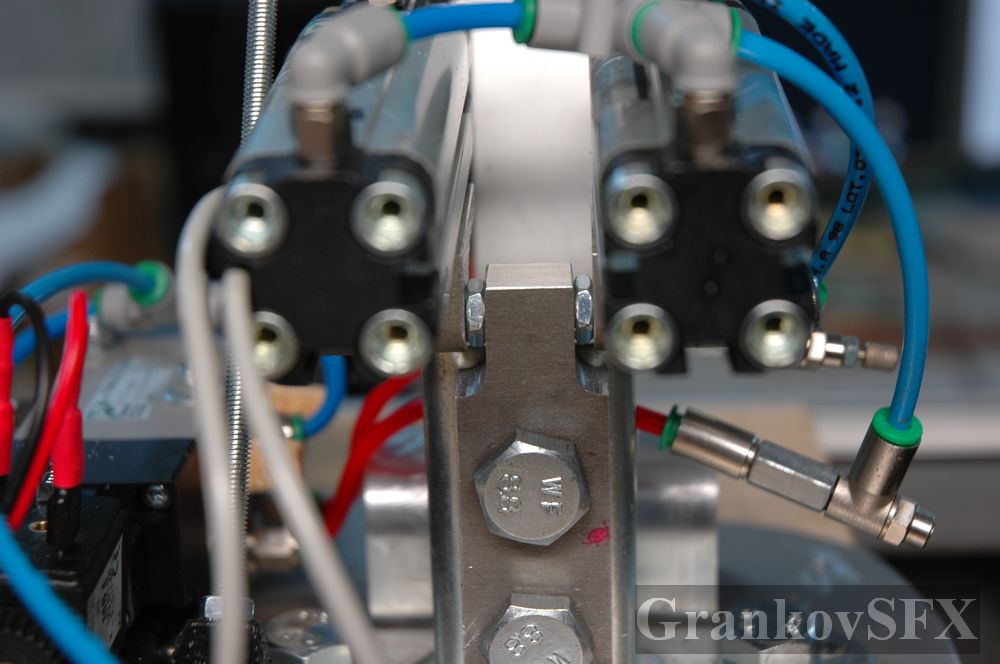
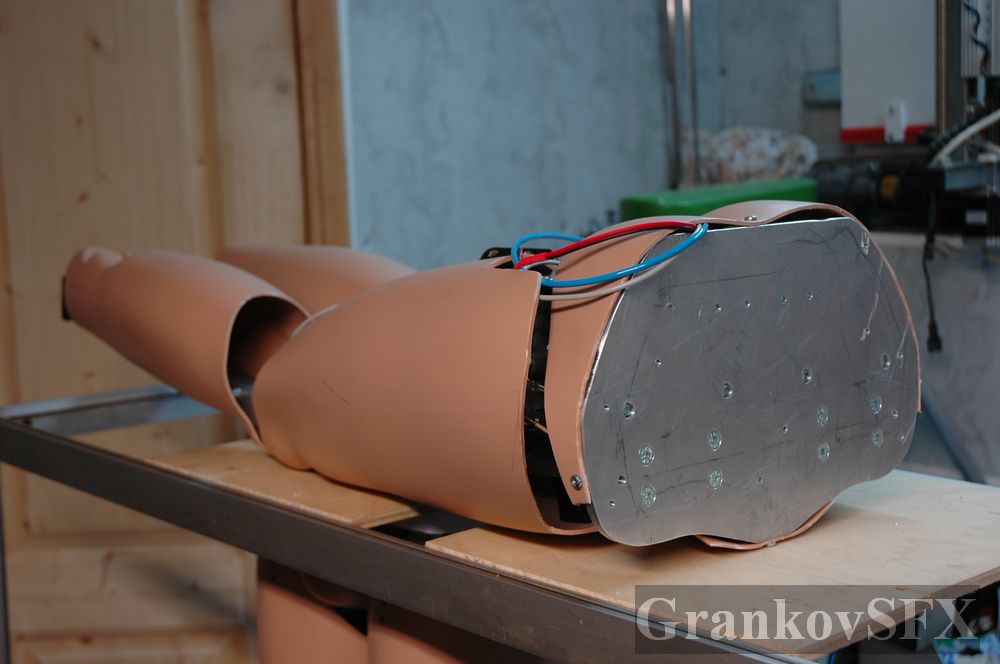
Я был удовлетворён своим результатом, но после того как я придал объём ногам и одел на них джинсы нагрузки возросли и пневматические приводы работали без запаса мощности. Я добавил ещё по одному пневмоцилиндру на ногу. Опыт показал, что цилиндры нужно располагать в паре с двух сторон от скелета ноги, потому как на одной оси они друг другу мешали (в галерее ниже есть пару фотографий с таким расположением пневмоцилиндров). Вторая доработка была следующей: я хотел чтобы скорость ходьбы регулировалась без перепрограммирования микроконтроллера. Достаточно однажды задать паузы между циклами и регулировать скорость подачей воздуха, регулируя её пневматическими дросселями. Поправить код программы помог мне мой друг Андрей Изранцев. Спасибо.














Таким образом я ещё раз убедился что преимущество пневматики в компактности привода при большой мощности. Если мощности не достаточно, то можно увеличить подаваемое давление. В моём случае я сильно увеличил запас мощности путём добавления ещё привода.
[uppod video=/video/animatronic/legs005.mp4 comment=»Первый прототип в обличении» align=center]
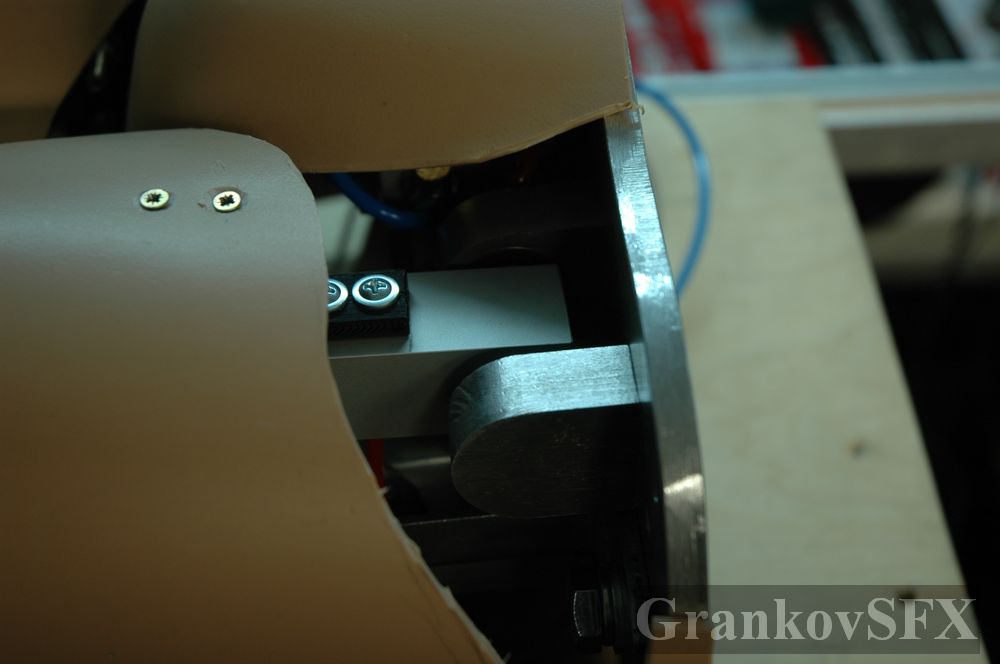
Мой 3D принтер печатает детали из пластика ABS и PLA, которые являются очень прочными материалами, но тем не менее пластик по прочности уступает металлам. На этом этапе прототипирование закончено, можно заказывать металлические детали и узлы аниматроника по существующим моделям. В этом мне помог мой друг Владимир — у него за городом металлообрабатывающий цех. Спасибо.